有没有大神可以把力矩的物理意义讲清楚?
38 个回答

谢邀,这里从物体(刚体)的转动说起。
如果看得累,可以至少看完第一 、第二部分~
一、物体转动与力矩的关系
首先,物体的运动有平动(Translational Motion)和转动(Rotational Motion)。比如,在斜面上推动一滑块,则该滑块为平动;开门时门绕定轴转,则为该门为转动。
物体平动时有位移 x ,转动时有角位移 \theta ;平动时有速度 v=\frac{dx}{dt} ,转动时有角速度 \omega=\frac{d\theta}{dt} ;平动时有加速度 a=\frac{dv}{dt}=\frac{d^{2}x}{dt^2} ,转动时有角加速度 \alpha=\frac{d\omega}{dt}=\frac{d^2\theta}{dt^2} 。
力(Force)直接改变物体平动状态,力矩(Torque)直接改变物体的转动状态!
合外力是物体平动状态改变的原因,而合外力矩是物体转动状态改变的原因!
对于平动,有 F=ma ,其中 F 为合外力, m 为惯性质量(即质量), a 为加速度;而对于转动,有 M=J\alpha ,其中 M 为合外力矩, J 为转动惯量, \alpha 为角加速度。
(对于转动也有写法为 \tau=I\alpha ,其中 \tau 为合外力矩, I 为转动惯量, \alpha 为角加速度。)
由此可知,力直接导致物体的加速度,而力矩直接导致物体的角加速度。当然,当合外力矩为0时,物体不转动,比如杠杆平衡。
二、对力矩计算的理解
力矩 是 力的一种使物体以一定角加速转动的能力。
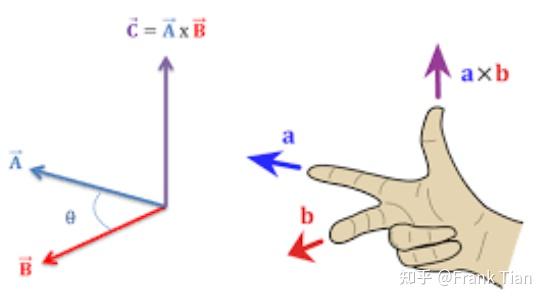
M=r\times F (矢量的叉乘)
力矩的大小: M=r_{\bot}F=rF_{\bot}=rFsin\varphi
力矩的方向:垂直于 r 和 F 所在的平面
三、力矩与物体静平衡
一个物体静平衡,既需要达到平动上的平衡也需要达到转动上的平衡。
平动上的平衡要合外力为零,而转动上的平衡要合外力矩为零。
即静平衡需要: \Sigma F=0 且 \Sigma M=0
这里给一个简单的物体静平衡的例子:
一长度为 l 、质量为 m_1 的梯子倚靠在光滑墙面上,与地面夹角为 \theta 。某工人站在梯子的三分之二高处,其与手上器具的总质量为m_2 。 若墙面与梯子的摩擦忽略不计,为了防止梯子下滑,梯子与地面的静摩擦系数至少要是多少?
梯子不下滑,需要静平衡,则合力、合力矩都必须为0.
受力分析:
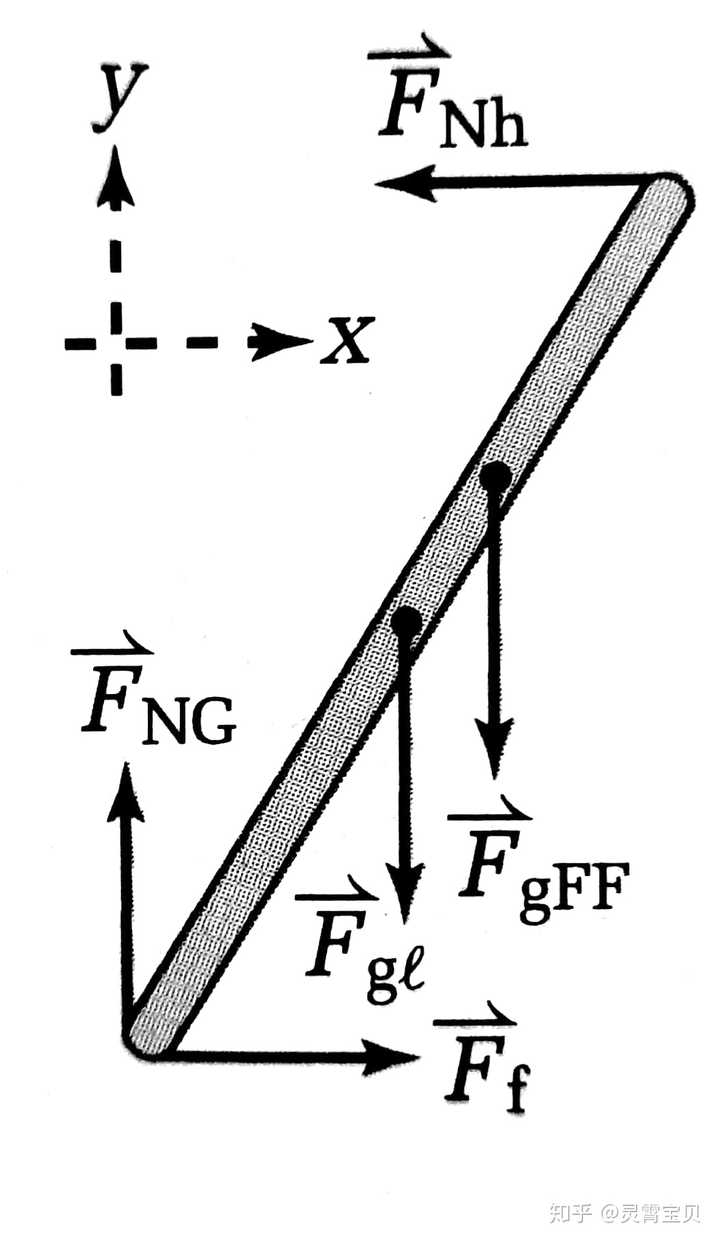
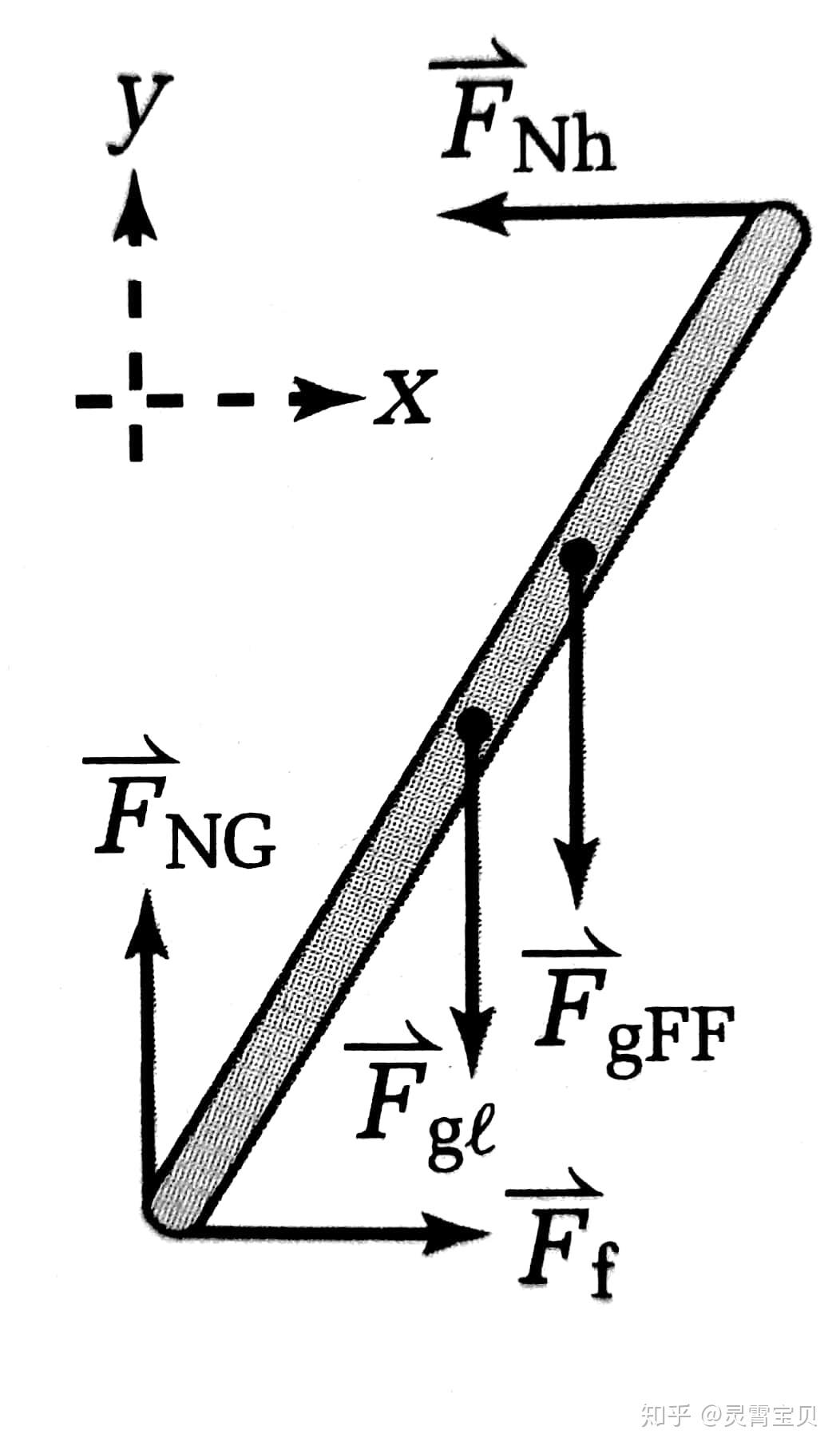
F_{Nh} - 墙对梯子的支持力
F_{NG} - 地面对梯子的支持力
F_{f} - 地面与梯子间的摩擦力
F_{gl} - 梯子的重力
F_{gFF} - 人与器具的总重力
选择梯子与地面的接触点为支点:
因为\Sigma F=0,所以 \Sigma F_x=0 且 \Sigma F_y=0 。
首先 \Sigma F_y=0
则 F_{NG}+F_{gl}+F_{gFF}=0
F_{NG}-m_1g-m_2g=0
F_{NG}=(m_1+m_2)g
同时 \Sigma M=0
则有 M_{NG}+M_{f}+M_{gl}+M_{FF}+M_{Nh}=0
0+0+\frac{l}{2}cos\theta m_1g+\frac{2}{3}lcos\theta m_2g+lsin\theta F_{Nh}=0
F_{Nh}=\frac{lcos\theta(\frac{1}{2}m_1g+\frac{2}{3}m_2g)}{lsin\theta} =cot\theta (\frac{1}{2}m_1g+\frac{2}{3}m_2g)
还有 \Sigma F_x=0
则 F_f+F_{Nh}=0
F_f=-F_{Nh}
\left| F_f\right|=\left| F_{Nh}\right|=cot\theta (\frac{1}{2}m_1g+\frac{2}{3}m_2g)
则梯子与地面的静摩擦系数至少为
\mu=\frac{F_f}{F_{NG}}=\frac{cot\theta (\frac{1}{2}m_1g+\frac{2}{3}m_2g)}{(m_1+m_2)g}=\frac{cot\theta (\frac{1}{2}m_1+\frac{2}{3}m_2)}{m_1+m_2}
四、力矩与物体平动加转动
一个物体平动遵守 F=ma, 转动遵守M=J\alpha。
【其中 F 为合外力, m 为惯性质量(即质量), a 为加速度;M 为合外力矩, J 为转动惯量, \alpha 为角加速度。】
这里给一个简单的物体平动+转动的的例子:
如图,细绳包裹着一个质量为 m ,半径为 R 的均匀实心圆柱体,圆柱体从静止开始下落。该圆柱的转动惯量为 \frac{1}{2}mR^2 。则当圆柱下落时细绳的拉力是多少?
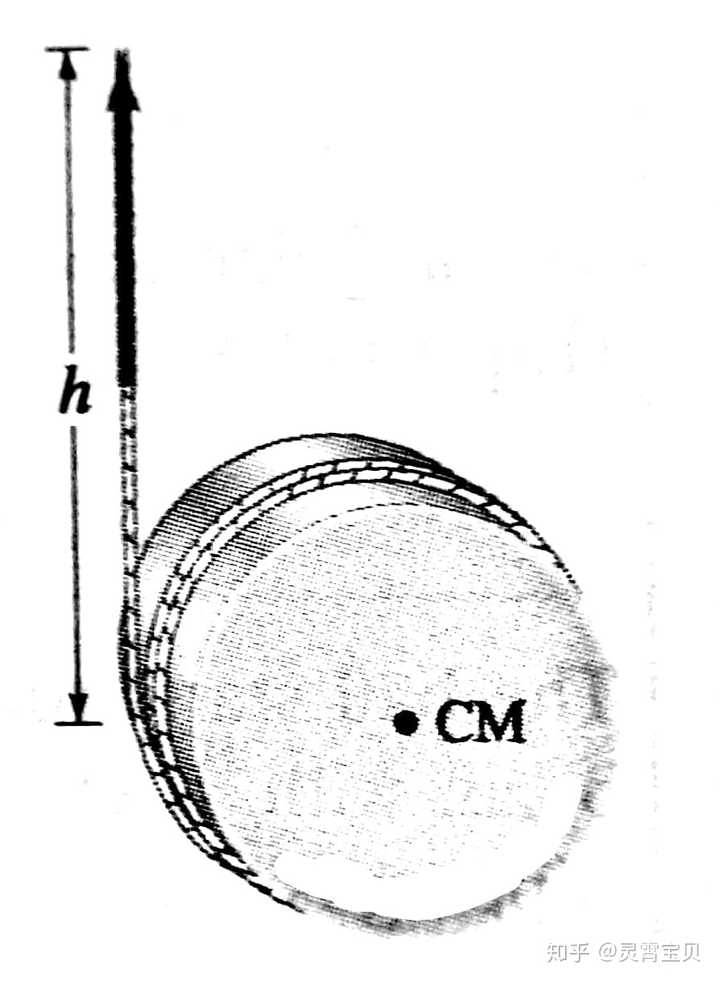
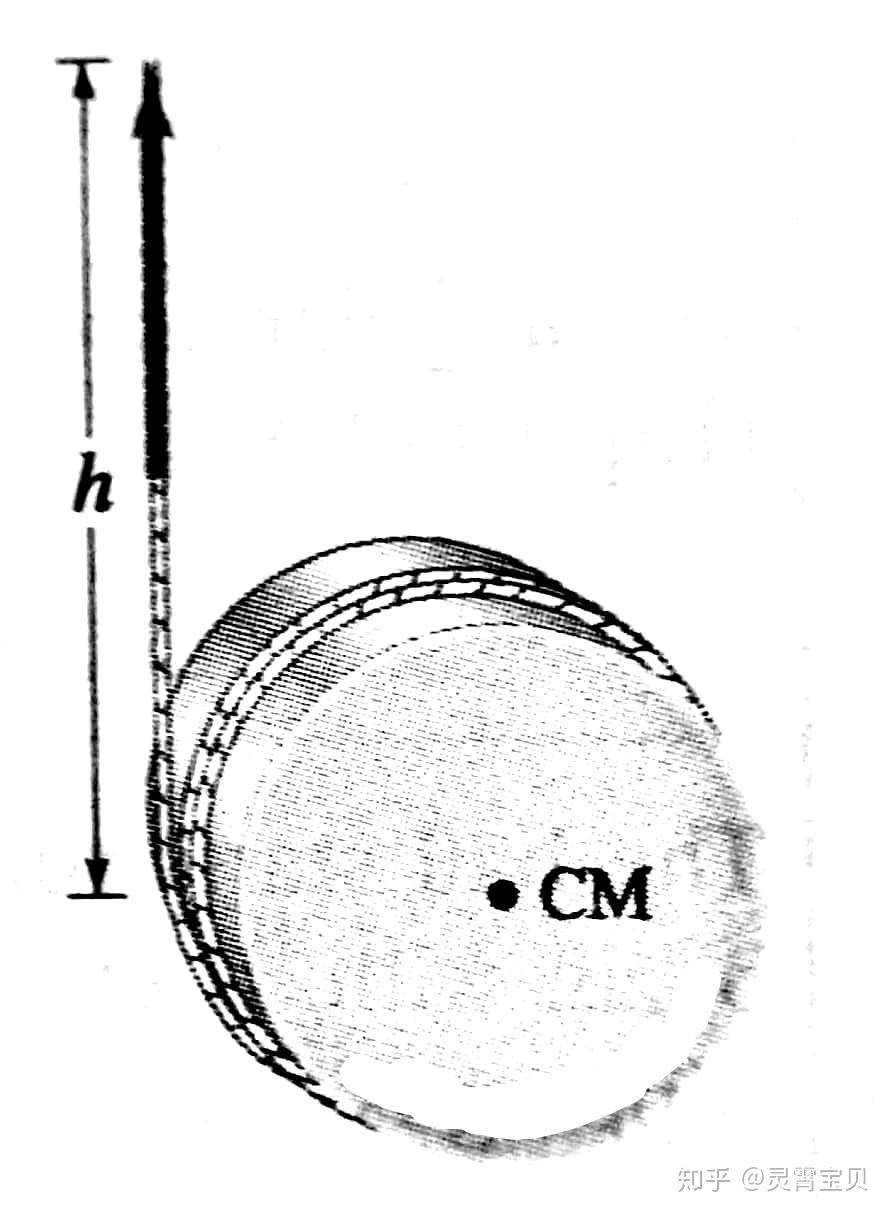
受力分析:
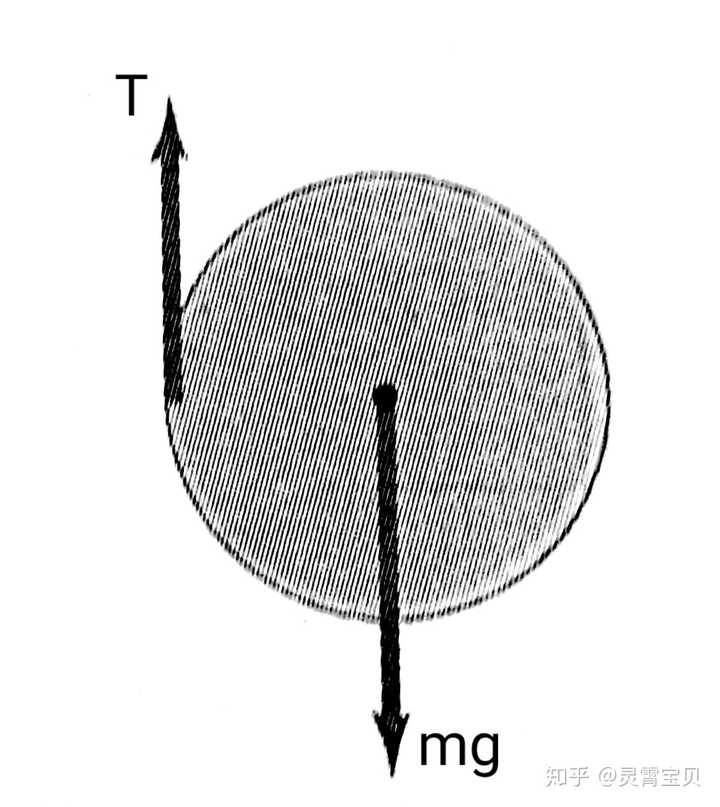

T - 细绳拉力
mg - 圆柱重力
该均匀圆柱绕质心转动,故力矩的大小为 M=TR 。
所以合外力矩为 M=TR 。
由于M=J\alpha
故有 TR=\frac{1}{2}mR^2\alpha ······ (1)
由于F=ma
故有 mg-T=ma ······ (2)
线加速度 a 与角加速度 \alpha 的关系为: a=R\alpha ······ (3)
联立(1)(2)(3),可得 a=\frac{2}{3}g
将a=\frac{2}{3}g 代入(1),得当圆柱下落时细绳的拉力为 T=\frac{1}{3}mg 。
五、力矩与角动量
物体的角动量等于其转动惯量与角速度的乘积: L=J\omega ,其中 L 为角动量, J 为转动惯量, \omega 为角速度。
则其微分形式为 dL=Jd\omega
由于 M=J\alpha , \alpha=\frac{d\omega}{dt}
故力矩可重新表示为 M=J\frac{d\omega}{dt}=\frac{dL}{dt}
由此可知,物体所受的外力矩等于其角动量的变化率。
由M=\frac{dL}{dt},可得 \Delta L=\int_{t_1}^{t_2}Mdt
由此可知,角动量的变化量是力矩对时间的累积效应。 \Delta L 也称为冲量矩。
这可以类比于物体平动所受的外力等于其动量的变化率、物体平动动量的变化量(冲量)是力对时间的累积效应。(F=\frac{dP}{dt} 、 \Delta P=\int_{t_1}^{t_2}Fdt)
六、力矩做功
首先,功的基本定义是:
dW=F\cdot dr
然后如下图:
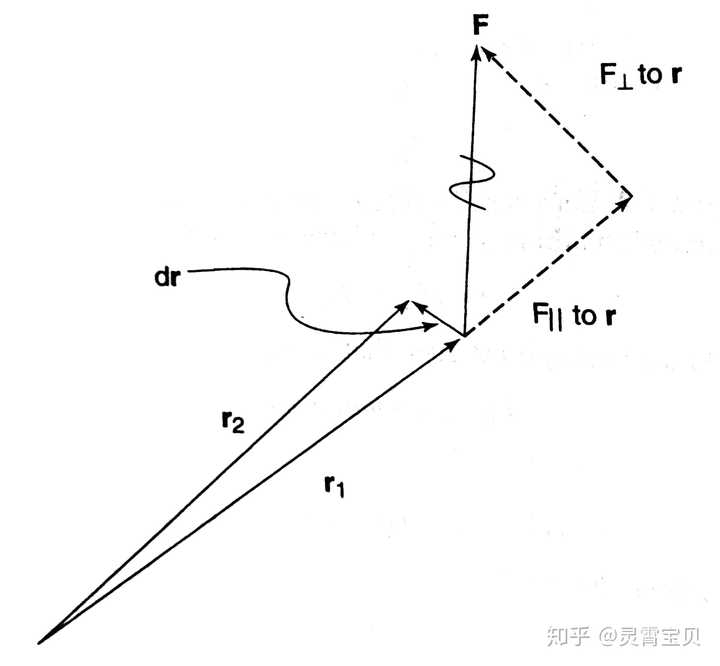

进一步地,根据矢量的点乘,对于定轴转动物体有 dW=F\cdot dr=(F_{\bot})(r d\varphi)
则 dW=(F_{\bot}r) d\varphi=Md\varphi
故 W=\int_{\varphi_1}^{\varphi_2}Md\varphi
因此,对(定轴)转动物体做的功,是力矩做的功。
类比于物体平动时力做功 W=\int_{r_1}^{r_2}F\cdot dr ,物体转动时有力矩做功 W=\int_{\varphi_1}^{\varphi_2}Md\varphi。
七、力矩与转动动能定理
之前所说外力矩做功有:W=\int_{\varphi_1}^{\varphi_2}Md\varphi
由于 M=J\alpha , \alpha=\frac{d\omega}{dt}
故有 W=\int_{\varphi_1}^{\varphi_2}J\alpha d\varphi=J\int_{\varphi_1}^{\varphi_2}\frac{d\omega}{dt}d\varphi
由于 \omega=\frac{d\varphi}{dt}
所以 W=J\int_{\omega_1}^{\omega_2}\omega d\omega=\frac{1}{2}J \omega_{2}^{2}-J\omega^2_1
因为定义物体的转动动能为 E_k=\frac{1}{2}J\omega^2 , 所以 W=E_{k_2}-E_{k_1}。
由此可知,合外力矩对物体做的功等于该物体转动动能的变化量。这就是转动中的动能定理。
这可以类比于物体平动时的动能定理:合外力对物体做的功等于该物体平动动能的变化量。
八、机械能守恒时力矩与势能的关系
在没有非保守力时机械能守恒:
E_{总}=E_k+E_p=常数
其微分形式为
dE_{总}=0=dE_k+dE_p
由于功等于动能的变化量 W=\Delta E_k=E_k-E_{k_0} ,微分形式 dW=dE_k
所以当机械能守恒时势能与功的关系为
dW=dE_k=-dE_p
之前已提, 对于定轴转动物体有 dW=Md\varphi
则 M=\frac{dW}{d\varphi}
故有 M=-\frac{dE_p}{d\varphi}
(注意仅当力矩是由保守力产生时该关系才有效。)
九、力矩与功率的关系
功率的定义为 P=\frac{dW}{dt}
之前已提, 对于定轴转动物体有 dW=Md\varphi
则 P=\frac{dW}{dt}=\frac{Md\varphi}{dt}
由于角速度 \omega=\frac{d\varphi}{dt} ,所以有 P=M\omega
类比于物体平动时功率 P=F\cdot v ,物体转动时有功率 P=M\omega 。
不过其实我写的打的也挺累的,给个赞吧~

啊这
考虑 \vec r \times \vec F
由牛顿第二定律:
\vec r \times \vec F=\vec r \times (\frac{d}{dt}\vec p)
由求导法则:
\vec r \times \vec F=\frac{d}{dt}(\vec r \times \vec p)+\vec p\times \frac{d}{dt}\vec r
而最后一项可以变形成
(m \vec v)\times \vec v=0
因此
\vec r \times \vec F=\frac{d}{dt}(\vec r \times \vec p)
定义 \vec r \times \vec p=\vec L 为系统的角动量,它的其中一个意义是质点矢径扫过面积速度的大小(读者自证),则
\vec r \times \vec F=\frac{d\vec L}{dt}
由此可以看出,力矩实际上对应一个转动上的效果,一如力对应一个平动上的效果
(如果你把上式写成 \vec M=\frac{d\vec L}{dt} ,对比 \vec F=\frac{d\vec p}{dt} ,可以看出 \vec F\rightarrow \vec M , \vec L\rightarrow \vec p ,两者形式上是一样的,因此你可以认为力矩就是转动中的“力”)
而实际上,在刚体力学中,设角速度 \vec \omega ,则
\vec M=\frac{d\vec L}{dt}=\frac{d}{dt}(\int_{}^{}(\vec r\times(dm\times\vec v)))=\frac{d}{dt}(\int_{}^{}(\vec r \times(dm\times(\vec \omega \times \vec r))))
由矢量分析公式:
\vec r \times(\vec \omega \times \vec r)=\vec \omega\cdot(\vec r\cdot\vec r)-\vec r\cdot(\vec \omega \cdot \vec r)=r^2\vec \omega-\vec r\cdot(\vec r \cdot \vec \omega)
代入得
\vec M=\frac{d}{dt}(\int_{}^{}(dm\times(r^2\vec \omega-\vec r\cdot(\vec r \cdot \vec \omega))))
引入惯量张量 \overleftrightarrow{I} , \overleftrightarrow{I}_{ij}^{}=\int_{}^{}(dm \times (r^2\delta_{ij}^{}-\vec r_{i}^{}\cdot\vec r_{j}^{})) ,其中 \delta_{ij}^{} 是克罗内克尔记号,当且仅当 i=j 时等于1,其余时候等于0,则
\vec M=\frac{d}{dt}( \overleftrightarrow{I}\cdot \vec \omega) ,这就是著名的刚体角动量定理,力矩之于转动的效果也可见一斑
以上。
角动量是空间旋转对称性下的守恒量,动量是空间平移对称性下的守恒量。(诺特定理)
力的时间累积效应对应了动量的变化量,力矩的时间累积效应对应了角动量的变化量。
那你就可以理解成力矩对应空间旋转系下物体间的相互作用。


一句话版:我们试图用一个简单的量描述外部作用对物体的转动产生的影响,发现力矩正好可以,于是就用它了。
所以,为什么研究转动不用我们熟悉的“力”,而是要再发明一个物理量呢?我们从合外力讲起。
“合外力“与”力的矢量和“
如果我们研究物体时所有外部作用的效果可以被“总结”为一个物理量,那么有了这个物理量我们就可以不去分别讨论所有的外力了。
我们称这个物理量为合外力。
这里的合外力的含义是:它对物体运动起到的作用等价于原来多个外力的作用之和。也就是说,合外力不是“多个力之和”,而是它的作用等价于“多个力的作用之和”。
当然,当我们考虑单个质点的时候,两者是等价的,也就是合外力=力的矢量和。
然而,如果我们不能再将物体看作一个质点,也就是说我们需要考虑物体的转动,那么合外力就很可能不再这么简单了。
举个例子,如果物体可以看作质点,那么它受到两个大小相等方向相反的力,当然力的矢量和为0,因此合外也为0,于是保持原来的运动状态。
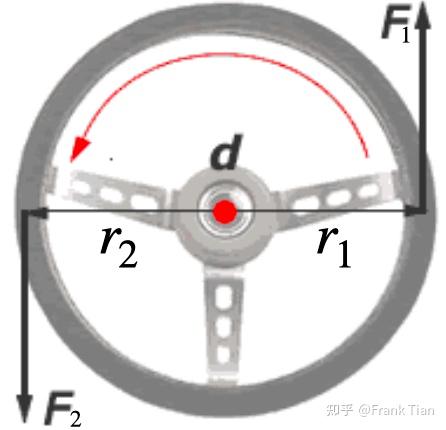
但如果不能呢,例如它是一个方向盘,受到两个大小相等方向相反的力:
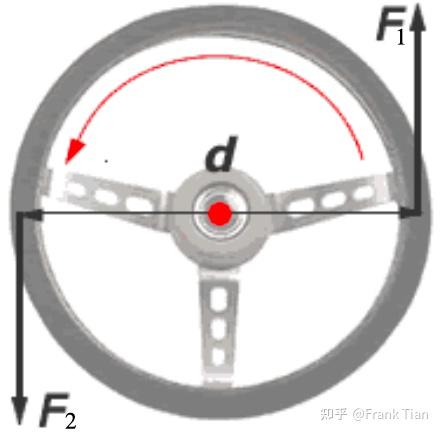

显然它不会保持静止——实际上我们转方向盘的时候两个手就是施加了这样的力,方向盘会转起来。然而,两个力的矢量和确实是 \vec{F_1}+\vec{F_2} =0 。
那么,这说明对于多个质点组成的系统,或者说刚体,力的矢量和不足以总计多个力对系统的作用。我们需要定义一个新的物理量。
力矩
我们以方向盘为例来分析一下这个系统。为了简化问题,我们把方向盘平放在平面的一个轴上,这样就不用考虑重力的影响。
还是上面图中的两个力,在一个水平放置的方向盘上,我们朴素的直觉告诉我们:这两个力的作用是相等的。如果你的直觉不是这样,可以把自己或着爹妈车上的方向盘卸下来做实验,毕竟这是物理,我们鼓励做实验。
换句话说,直觉告诉我们,在方向盘把手上的任何切向且大小与 \vec{F_1} 相等的力,作用都是相同的。
我们来好好分析一下这个事实:按理说作用完全相同的力应该被表示成同一个物理量。就比如说我们研究系统消耗的能量,那么我们可以使用“功”这个物理量,无论两个力的大小方向或者物体的位移有什么差别,只要他们的功相等,我们就说这两个力在研究能量时是等价的。
那我们就需要找到一个中间的物理量,让它满足“一旦两个这样的物理量相等,我们就认为他们在研究转动时是等价的“。
回到方向盘的例子中, \vec{F_1} 、 \vec{F_2} 或者任何沿切线的力都有这样的特点:
- 大小相等
- 方向不同,但都沿着切线
- 作用点不同,但都在放线盘的把手上
既然他们的作用是相同的,那么他们我们就应该可以把矢量力 \vec{F} 和作用点通过某种运算表示为另一个物理量。此时作用点还不是矢量,我们可以考虑在圆心建立原点,这样用圆心到作用点的位矢 \vec{r} 表示作用点的位置:

于是矢量 \vec{F} 和矢量 \vec{r} 就概括了力和作用点的全部信息。这样,我们就是要找到一种 \vec{F} 和 \vec{r} 之间的运算(我们先用 \otimes 表示),满足对于上述的 \vec{F_1} 、 \vec{F_2} 或者其他力 \vec{F_n} ,以及他们的作用点(都在把手上) \vec{r_1} 、 \vec{r_2} 和 \vec{r_n} ,都有
\vec{r_1}\otimes \vec{F_1} =\vec{r_2}\otimes \vec{F_2} =\cdots=\vec{r_n}\otimes \vec{F_n}
此时我们还不能拍脑子想出这个运算是什么。我们再来做更多思维实验。
我们考虑一个新的力 \vec{F_3} ,它在力 \vec{F_2} 的基础上多了一个水平向右的分力:
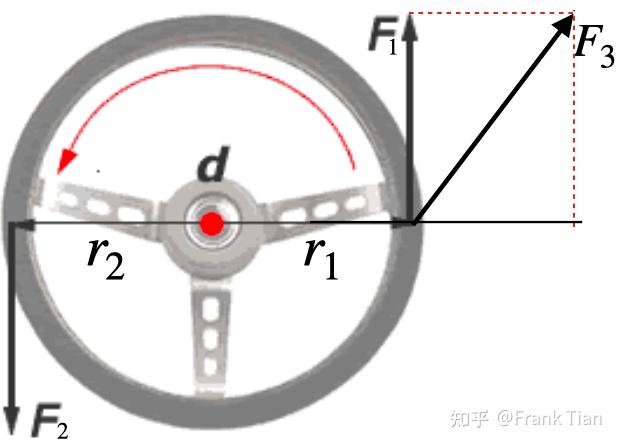

由于这个分力是水平向右的,他不会影响方向盘的转动。于是运算 \otimes 还需要满足
\vec{r_1}\otimes \vec{F_1} =\vec{r_1}\otimes \vec{F_3}
很容易发现这样的事实: \vec{r_1},\vec{F_1} ,\vec{r_1}+\vec{F_1} 三个矢量组成的三角形和 \vec{r_1},\vec{F_3} ,\vec{r_1}+\vec{F_3} 组成的三角形面积是相等的!
同时,他们与其他“把手上的力和作用点“,例如 \vec{r_2},\vec{F_2} ,\vec{r_2}+\vec{F_2} 组成的三角形面积也是相等的!
那么,我们能不能大胆假设, \vec{a}\otimes \vec{b} 就表示 \vec{a}, \vec{b}, \vec{a+b} 组成的三角形的面积?
我们刚才讨论了作用点相同但是力不同的情况,现在我们来讨论一下作用点不同的情况。例如在位矢 \vec{r_4} = \vec{r_1} /2 处的一个大小为 \vec{F_4} =2 \vec{F_1} 的力:
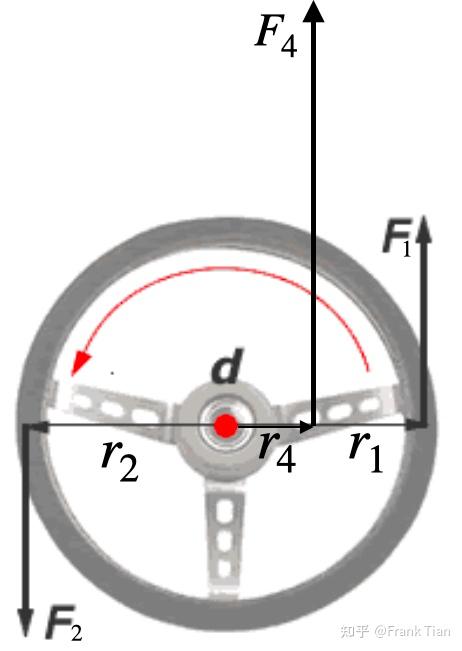

如果你熟悉天平或者跷跷板,就能很快的发现这两个力对转动的作用也是相等的!(你可以尝试把 \vec{F_4} 翻转,就会发现如果只施加 \vec{F_1} 和 \vec{F_4} 方向盘不会转动)于是我们有
\vec{r_1}\otimes \vec{F_1} =\vec{r_4}\otimes \vec{F_4}
而且还要注意 \vec{r_1},\vec{F_1} ,\vec{r_1}+\vec{F_1} 组成的三角形 \vec{r_4},\vec{F_4} ,\vec{r_4}+\vec{F_4} 组成的三角形面积也是相等的!
当然你可以做更多的实验验证,但是我现在就要说明: \vec{a}\otimes \vec{b} 的大小就可以表示为 \vec{a}, \vec{b}, \vec{a+b} 组成的三角形的面积。
然而,不难发现, \vec{a}\otimes \vec{b} 不能只是面积的大小。因为 \vec{F_1} 与 \vec{F_1} 的反方向力 \vec{F_5} 的作用正好相反
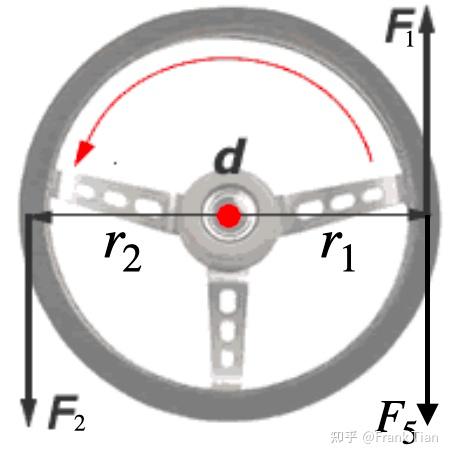

换句话说,如果我们同时施加 \vec{F_1} 和 \vec{F_1}\vec{F_5} ,两者是一对相反力,力都抵消没了对旋转的作用当然也会抵消,于是有
\vec{r_1}\otimes \vec{F_1} = -\vec{r_1}\otimes \vec{F_5}
那么于是 \vec{r_1}\otimes \vec{F_1} 是一个有方向的量。到这一步,我们其实可以给 \vec{r_1}\otimes \vec{F_1} 添加一个正负号,例如如果我们能将 \vec{r} 顺时针转到 \vec{F} 那么它就是正的,反之它就是负的。
然而,考虑到更一般的问题,我们将 \vec{a}\otimes \vec{b} 设计成一个矢量,这可以放便我们处理空间中的任意旋转,而不是简单的定轴转动。
那么 \vec{a}\otimes \vec{b} 的方向应该如何呢?
我们还用 \vec{r_1}\otimes \vec{F_1} 作为例子,显然 \vec{r_1}\otimes \vec{F_1} 的方向不应该在方向盘所在的平面内。这是因为对于任意的“把手上的力和位矢”, \vec{r}\otimes \vec{F} 都应该具有相同的大小和方向,也就是说 \vec{r}\otimes \vec{F} 的方向要与所有这些 \vec{r} 和 \vec{F} 的方向都无关!
答案呼之欲出了,这个矢量的方向必须与平面垂直。
于是,我们最终发明了运算 \vec{a}\otimes \vec{b} ,它的大小是 \vec{a}, \vec{b}, \vec{a+b} 组成的三角形的面积,不难发现其实就是 |\vec{a}|\cdot|\vec{b}|\cdot \sin \langle \vec{a},\vec{b} \rangle 。而它的方向就是右手拇指的方向:

最后,我们不妨用 \times 表示这个运算,并把它命名为叉乘。
相应的,位矢 \vec{r} 与力 \vec{F} 叉乘得到的物理量我们就成为力矩 \vec{M} = \vec{r}\times \vec{F} 。
力偶与力偶矩
其实到现在力矩的含义已经介绍完了,我们似乎可以认为力矩用于描述旋转,或者换句话说旋转都是力矩带来的。
然而事实真的如此吗?
在上面对方向盘的分析中,我们引入了叉乘,这没什么问题。但有问题的是叉乘的两个量,或者更直白的说,有问题的是位矢。
位矢是从转轴到力作用点的,“到力作用点”这个还好理解,毕竟力就作用在这里,但为什么是从转轴出发?转轴有什么特别的?不会老师这么讲我就得死记硬背下来了吧?
实际上,转轴确实特别,因为它提供了约束力。
由于方向盘不可以平移,只能转动,因此整个物体受到的力的矢量和必须是零。于是轴对方向盘施加的力就很容易确定了:它与 \vec{F} 等大反向,且作用在转轴中心 O 点上。
我们将大小相等方向相反,但作用点不同的两个力称为一对(简单)力偶。
也就是说,对于方向盘而言,它任意时刻受到的力都是一对力偶,分别来自外力和转轴的约束力。此时我们不再以中心 O 作为出发定义位矢,而是找任意一个点 Q (可以不是 O 点),考虑这对力偶与“ Q 到力的作用点的位矢”分别叉乘的结果:
- 外力(我们称外力的作用点为 P ): \vec{QP} \times \vec{F}
- 轴带来的约束力: \vec{QO} \times (-\vec{F})
我们不妨把它们相加试试:
\vec{QP} \times \vec{F}+\vec{QO} \times (-\vec{F}) = (\vec{QP} - \vec{QO})\times \vec{F} = \vec{OP} \times \vec{F}
神奇的事情发生了:得到的结果与 Q 的选择无关!
我们称这个力偶的力矩之和为力偶矩,它与位矢的参照点无关。
于是我们可以说,旋转是力偶矩带来的。我们选择 O 点作为参照点计算位矢,只是因为它得到的力矩恰好和力偶矩相同!
简单力偶有简单两个字,那么什么力偶不简单呢?
其实就是多个力,它们的和满足 \sum_i \vec{F_i} = 0 ,也就是说一般意义上的力偶可以是多个力。通过前面的分析,我们发现在方向盘上施加任何力,甚至是同时施加多个力,都可以被看作是力偶(因为无论如何方向盘都不能平动,因此力的矢量和必须是零),因此方向盘的一切转动都是由力偶带来的。
刚体的自由运动
在前面已经完整的解释了定轴转动,那么我们不妨更进一步,看看在一般的刚体运动中力矩扮演怎样的角色。
力系的简化
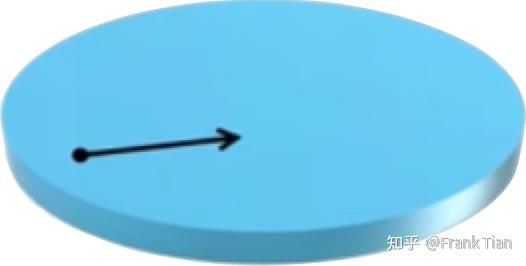
考虑光滑平面上的圆盘以及一个施加在某点的力:

首先我们介绍两个定理,他们很容易理解:
- 当物体受到通过质心的合力时,物体的运动将变为纯粹的平移运动(平动)
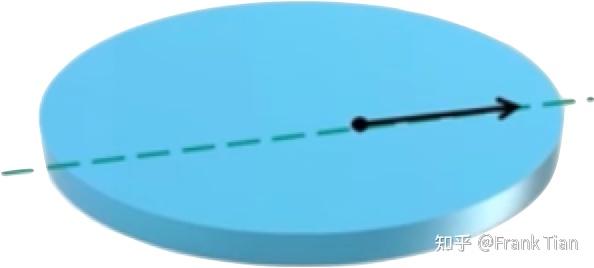
- 力的作用点可以移到过作用点上与力的方向平行的线上的任意点,而不产生任何额外效果
“过作用点上与力的方向平行“如下图中绿色虚线所示:

这两个定理都可以通过刚体的定义证明,我们这里就不展开了。
此外还有第三个定理:考虑施加在刚体上任意点的力 \vec{F} (下图左边黑色),我们在另一个点 O 上引入与这个力平行的一对大小相同反向相反的力(下图右边以 O 为中心的两个力)。显然下图的等号是成立的,因为引入的两个力抵消了:
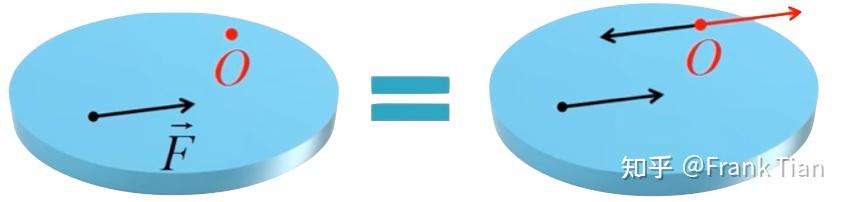

这意味着,对于任意点的力 \vec{F} ,都等价于另一点上相同大小和方向的力,以及一对力偶。我们把这个事实称为力的平移定理。
旋转都是由力偶产生的
结合上面的定理,我们不难得到这样的事实:
对于施加在刚体上任意点 P 的力 \vec{F} ,我们都可以把它表示为作用于质心 O 上的相同大小和方向的力,以及分别作用于 P 和 O 上的力偶。
作用于质心 O 上的力不会导致物体的旋转,于是只可能是力偶导致物体旋转。通过这样的方式,我们可以说旋转都是由力偶导致的。
当然,对于刚体的自由运动,并没有固定的旋转轴,我们往往为了简化计算把轴定在刚体的质心上,因此我们才把外力平移到 O 点。

尝试使用最清奇的思路理解最复杂的定义。
2021.5.8
试着换个角度理解转动惯量,最后力图贯通质点运动和刚体运动。
图什么的,原本是真的真的真的打算画的,但是考虑到大家自己动手画图对理解有帮助,对吧,所以为了促进大家的学习,我没画!
如果大家真的需要,我再补好bua。
原本想写一写电磁学的,但是感觉基本上都挺好理解的吧。
比如电场 E 的引入,虽然因为涉及到了场论,导致要想理解电场是客观存在,并且具有能量、质量和动量的观点略微有些困难,但是书上单说这样可以对电荷周围空间各点赋予一种局域性,从而减少运算量,已经足够让我们接受其存在的价值了。
包括关于电偶极子在电场中受到的力矩为 M=P*E ,其理解起来也需要场的知识。
值得一提的是,高斯定律存在的意义是根据已知的电场强度分布求解任意区域内的电荷。
这是因为实际情况下,能将 E 从 \oint_{S}^{}E*dS 中提出的例子少之又少,而库仑定律才是求解电场分布最普适的选择,不过以后不走这个方向的同学其实不用太过在意。
不过唯有电荷的量子性,我真的难以接受。
如果大家实在想让我写一篇有关电磁学的,就评论告诉我哪块内容没能够理解,我会试着用最通俗的语言重新描述一下的。
这篇应该以后不会更了,感觉都解释的差不多了吧,emmm或者大家还有什么想要我解释的,我可以再补补?
hxdm记得点赞/鞠躬。
2021.4.8
啥都没更新,我还在想怎么谋篇布局,最近在学电磁力,interesting,感觉分支物理总是这么相似呢!!快点搞完旋转去玩电磁学了!!!
唯有一事相求,动动你们可爱的小手多点点赞吧,这样我才有写下去的动力嘛!!!
收藏比赞多也太令人难过了吧,好xdm!!!
这句话真的很重要,请一定要好好琢磨!
真的很重要,请一定要好好琢磨!
很重要,请一定要好好琢磨!
对于任何一个力作用在任意一个物体上,物体都将有沿力的作用方向运动的趋势。
一、力F为平动力
若力 F 的作用线贯穿圆心,圆将沿力 F 的方向运动。
又由于力 F 的方向不变,所以圆保持平动。
此时,亦可将圆看作质点,其运动规律也均与质点相同。
二、力F为转动力
若力 F 的作用线为圆的切线,圆也将沿着力 F 所指的方向运动。
虽然力 F 的作用点不变,但是作用点的位置会随着圆的运动而改变。
因此,力 F 的方向虽然一直保持切向,但却时刻变化。
此时更换参考系,假设力 F 不动,圆动,为了保证力 F 的方向始终与圆相切,圆只能转动。
这也解释了为什么在现实生活中,力的作用线即使贯穿圆心,圆也会发生转动。
是因为有摩擦力的存在,而其方向为切向,于是物体受摩擦力发生转动。
三、力F为任意力
若力 F 的作用方向不为上述情况,由于上述两种情况的力的作用线互相垂直。
因此,必可通过正交分解将其分解为上述两种力(转动力和平动力)。
于是就有转动力 F*cos\varphi ,平动力 F*sin\varphi ( \varphi 为力 F 与切线的夹角)。
四、R的由来
对于两个不同大小的圆,有同一力 F ,均作用于圆的切线上,其产生的效果却是不同的。
因此我们需要一个可变量与力 F 相乘,以展示力F在不同情况下的效果(权重)。
通过多次实验,可以发现,权重与 R\bot 的大小呈正比相关,于是我们定义了一个新变量 M (力矩),用来表示 R\bot*F=R*F*sin\theta=R*F*cos\varphi ( \theta 为力 F 与作用点和圆心的连线的夹角)。
为什么不用 \frac{R\bot}{R} 来更好的表示权重?
主要原因在于,这样表示的话在后面表示力 F 做功时可以直接套用力矩 M 。
原本想再多休息一会,周末再研究,但是看到这么多小伙伴想学,我立马起来干活!!!
不过这些也都只是我个人的理解,我不能保证对就是了。
但是,至少我觉得逻辑是通顺的,而且这样理解也的确效果更好,更能和其他知识串在一起。
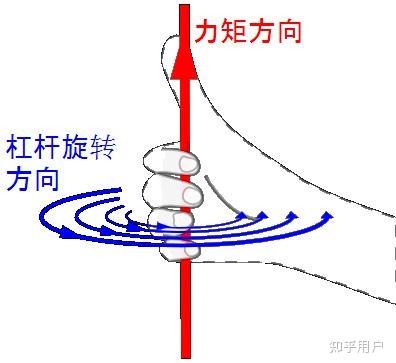
五、M(L)的方向
将力矩 M 的方向定义成垂直半径 R 与力 F 所组成的平面,主要是因为这样可以清晰的表达受力物体的转动方向。
因为从受力体上任意一点来看,物体转动方向是时刻在变化的。
而脱离单一的点,从宏观角度下观察的话,我们可以描述其是逆时针或者顺时针,那么用右手螺旋法则来定义它的确不失为一种简单的方法。
原本这里有很长的篇幅是我想讲一下进动与力矩方向定义的关系。
但是,写完了之后发现,其实我自己也没搞懂进动。
书上说,进动是让物体绕自身对称轴高速旋转后,它的轴会在水平面内以杆顶为中心转动,既没提到外力推动,也没说转动方向(附一张书上的图)。
而百度上说,进动是指一个自转的物体受外力作用导致其自转轴绕某一中心与自转方向相同的旋转。
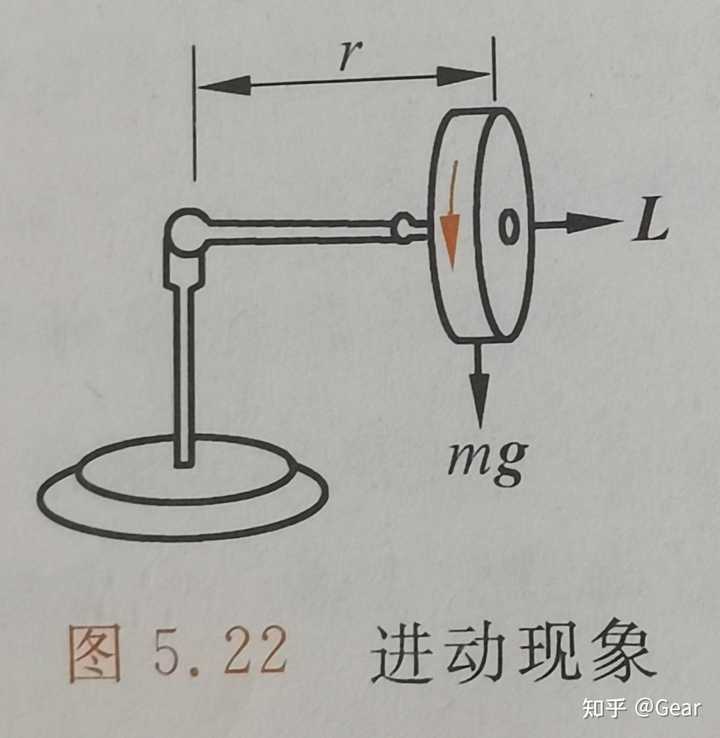

至少目前我觉得百度上的说法较为合理,当然外力推动可能是由于静摩擦力的存在,所以理想情况下可以忽略,自转方向的话应该是有关系的。
具体的还是等我自己做做实验再看吧。
为什么明明力矩的单位是 N*m ,定义上却只是把它描述成一种趋势而不是力呢?
原因主要有两个:
1、如果力矩是力,那它就能与半径 R 叉乘,产生力力矩?然后力力矩又能继续叉乘?显然这是不可能的。
2、如果不人为规定力矩的方向,那么无论是将力矩 M 设定成半径 R 的方向还是力 F 的方向都不满足力的性质——物体运动方向与作用力同向。
六、角动量
这边先空着吧,有空再写,大家可以自己研究研究,我个人觉得只要把力矩理解通了,剩下的还是比较好解决的。
稍微解释一下,为什么力矩 M 不是力,却能做功?
其实力矩 M 所做的功就是 F*cos\varphi 所做的功,并且功的大小就是 \int_{}^{}R*F*cos\varphi*d\theta ,同时这里的 \int_{}^{}R*d\theta 其实就是假设力 F 不动,作用点走过的弧长,即 W=F*l 中的 l 。
七、陀螺仪
写这个主要是因为研究陀螺仪的时候没找到什么好的解释,所以自己写一下。
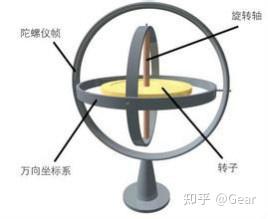

百度上的图,拿过来用一下,我画图太菜了,正在找人帮忙画图ing。
其实任何三维平动都是由三种简单平动组合而成,分别是上下、左右、前后。
那么任何三维转动也可以由三种简单转动组合而成,分别是上下转动、左右转动、前后转动。
一一考虑,上下转动大家肯定都没问题。
前后转动:这个也比较简单,可以很直观的看出陀螺仪帧前后转动时,万向坐标系不会跟着转动。
左右转动:陀螺仪帧左右转动时虽然会带动万向坐标系左右转动,但是万向坐标系左右转动并不会带动里面的万向坐标系转动(我也不知道叫什么),因此转子依然不会改变方向。
也是基于这个道理,才需要三个互相垂直的圆来定向,确立一组 x-y-z 坐标系。
最后就是转子最好要选取转动惯量大的(类比质量大的),这样可以转的久一点。
八、何为J
转动惯量是什么?课本上将其称为刚体在转动过程中表现出的惯性,通俗易懂,但是为什么呢?就因为它和质点运动的公式如此相似吗?
显然不是的,如果要解释这个问题,我们需要假设一个新的物理量 m_{r}=m*r ,并将其命名为质量矩。
借此,我们可以将刚体运动的公式全部用 m_{r} 替换,得到下列式子:
M=m_{r}*a*sin\theta=m_{r}*a*cos\varphi=m_{r}*a_{tangential}
L=M*t=m_{r}*v*sin\theta=m_{r}*v_{tangential}
tangential:切线的,正切的。
是不是感觉 M 和 F , L 和 P 突然很像呢?同时又有以下公式:
M=J*\alpha=J*\frac{a_{tangential}}{r}
考虑到 L 类似于 M ,这里就不过多讨论了。
这里其实可以发现,所谓的刚体转动,不过就是比质点运动多考虑了一个权重 r 而已。
联立一下有:
J=m*r^{2}=m_{r}*r=\frac{m_{r}^{2}}{m}
最后再看动能公式:
E_{k}=\frac{1}{2}*J*\omega^{2}
代入 J 得:
E_{k}=\frac{1}{2}*\frac{m_{r}^{2}}{m}*\omega^{2}=\frac{1}{2}*\frac{m_{r}^{2}}{m}*\frac{v^{2}}{r^{2}}=\frac{1}{2}*m*v^{2}
由于刚体转动中的 v 为外沿的转动速度,因此有 v=\omega*r 。
乍一看,这可不就是质点运动吗?
至此,我们新定义了一个物理量——质量矩 m_{r} ,用它将刚体转动的公式重新解释了一遍,并且令其与质点运动的公式变得几乎一模一样。
因此,何为 J ?其不过是一个人为定义的物理量,目的是使刚体运动的公式与质点运动的公式更加的相似而已。
看到这的小伙伴肯定好奇,明明 m_{r} 比 J 对质点运动的公式的类比程度更高,为什么最后选用 J ?
我想可能大概就是因为太像了,过犹不及吧,当然关键原因还是因为对于转动来说 \omega 远比 v 好用。
最后,这也成功的解释了为什么机械能守恒对于质点运动和刚体转动是通用的。
我一直相信各种知识是可以串联的,如果我还想写什么的话,我可能会试着把数学上的叉乘和物理上的比一比,但是不知道能不能成功。
如果还看到什么有趣的关于转动的现象,我也会写在这里。
最后,有什么其他问题也可以私聊我,非常乐意解答。
将这个问题分成三步来回答,希望高中生也能理解。
一,为什么需要力矩和角动量的概念。
我们知道力和动量的关系为 Fdt=mdv=dP ,即力的大小决定了动量的变化速度。这适用于物体的平动。
如果我们引入转动,则势必需要考虑物体的受力点和转动轴之间的距离 r (力臂)。我们在上式两侧都乘上力臂,就变成 rFdt=rdP=drP 。我们将 rF 称作力矩( \tau ),而 rP 称作角动量( L ),则上式变成 \tau dt=dL ,意味着力矩的大小决定了角动量的变化速度。
二,力矩的方向和角动量的方向
形成力矩的两个量,力和力臂,都是矢量;类似的,形成角动量的两个量,动量和力臂,也都是矢量。因此,力矩和角动量也是矢量。我们可以进一步将这些物理量表示成 {\displaystyle {\vec {\tau}}} 、 {\displaystyle {\vec {L}}} 、 {\displaystyle {\vec {F}}} 、 {\displaystyle {\vec {r}}} 和 {\displaystyle {\vec {P}}} 。矢量相乘是叉乘,满足右手定则。我们可以让力臂的方向箭头穿入手掌,四指朝向力(或动量)的方向,则大拇指指向力矩(或角动量)的方向。

注意,力矩和角动量的方向并不一定相同,力矩的方向指向角动量变化的方向。
三,力矩的大小
如前所述,力和力臂相乘是叉乘。计算力矩的大小时需要将力以平行四边形法则进行分解,只有垂直于力臂的分力才能提供力矩。


所以,我们一般可以用 \left| \tau \right|=\left| r \right|\left| F \right|sin\theta 来计算力矩的大小。
以上。

尝试回答一下这个问题。
一个刚体,比如一块石头m受到一个力F的作用。
按照牛顿第二定律,会产生一个加速度a,做均加速直线运动,F=ma。
力可以理解为 以加速度a运动的质量为m的物体的一种静态的状态描述。
力的大小数值上等于单位质量物体的加速度大小。
对于转动,力矩M=nb(其中n是转动惯量n=mr²,b是转动加速度,r是质点到转动中心的距离)。
力矩可以理解为 以转动加速度b运动的转动惯量为n的物体的一种静态的状态描述。
力矩的大小数值上等于单位转动惯量物体的转动加速度的大小。
他们描述的都是静态的,描述的都是物体所处的一种状态。
只不过,力描述的是直线运动的一种状态。 力矩描述的是转动运动的一种状态。
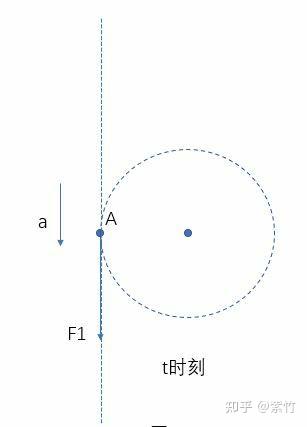

直线运动和转动在t时刻,在A点重合,所以力矩和力可以通过乘r来换算。M=Fr
手机打字不容易,点个赞在走吧

有些场合下力矩的地位就和力差不多,在转动时会有所谓“力矩做的功”。

力矩对于角动量,就犹如力对于动量。
动量是力的时间积累,角动量就是力矩的时间积累。
力能改变物体的动量,力矩改变物体的角动量。
物理学就是这么对称的

要讲明白这个问题我觉得不容易,不过我回答过类似的问题。
首先我们可以把力F可以看作一种流动的东西,只不过有点特殊,因为F是一种向量,因此在规定正方向的情况下,与正方向一致的F为流入,相反为流出。
也就是说,力F流入物体m,物体m存储的动量就会变化。就像一个水池,上面在放水,下面在漏水。放水的流量为Q,漏水的流量为L,那么水池里的水量变化的速率就是H=Q-L。
所以物体m存储的动量变化率为d(mv)/dt=∑F。这个公式应该能看懂吧?就是物体m存储的动量变化率等于流入的力减去流出的力。
Ok,其实转动也是一样的,只不过力F变成了力矩M。
也就是说,物体J存储的角动量Jω的变化率,等于流入的力矩减去流出的力矩。也就是公式d(Jω)/dt=∑M。
为什么上面两个公式的原理一模一样?
最主要原因就是物体的固有状态是一定的,也就是说“质量与质量分布”其实是同一回事。质量对应力的流入流出,而质量分布对应力的分布的流入流出。而力的分布,其实就是力矩。

先说结论。力的物理意义就是使物体的平动状态发生改变。力矩的物理意义就是使物体的旋转状态发生改变。力的定义就是物体动量的改变速度,力矩的定义就是物体角动量的改变速度。
由于所有的力都可以认为是一个大系统内部的力,没有无缘无故的爱,也没有无缘无故的力,爱是相互的,力也总是相互的,所以系统的总动量和角动量总是守恒的。从一个角度说,如果要求物理规律满足时空平移和转动不变性,也就是宇宙本身没有特殊的时空点和方向,那么任何总的系统就应当自然满足动量守恒和角动量守恒。反之,如果有特殊的方向或者时空点,那么就不满足,这个时候是否也挺有意思的?特别是对于子系统,是不是会导致外力的诞生?有意思。
单个物体的运动只有平动,没有转动,其运动自由度为3。此时就没有力矩什么事了。
两个物体之间的运动自由度为6。可以分解为总体的平动和一个物体绕另一个物体的转动。而这个转动程度的大小用物理量角动量来度量,其改变速度就是力矩。对应的,平动的度量用动量,改变速度的大小是力。
至于说三个物体之间的相互运动是否会产生新的守恒量,对应于三阶微分方程的三个第一积分呢?应该是有的,我研究研究,不过三体运动是混沌系统哦,在混沌系统中找到新的守恒量应该很有意思。
总之,物体的运动形态可以分为平动和转动。力的物理意义就是使物体的平动状态发生改变。力矩的物理意义就是使物体的旋转状态发生改变。没有别的。
我画了一个三维图,写了一点东西,可能对于理解力矩有所帮助。
力矩(或动量矩)投影为什么相等?
讨论人体击打乒乓球力学原理时,常常采用球拍围绕人体垂直轴做圆周运动的简化物理模型。由于人体是一个高度复杂的生物巨系统,属于可变质点系。从理论上说,人体挥动球拍做圆周运动的力矩M采用质点系对z轴的角动量定理来分析、讨论比较合理,即Mz=∑Mzi= dLzi/dt。
质点系中每个质点i所受外力Fi(e)对z轴的力矩Mzi等于该点i对z轴上任意一点o的力矩Mi(o)在z轴上的投影。很多人对此有些疑惑,为什么点i对z轴上任意一点o的力矩Mi(o)在z轴上的投影都是相等的?要知道它们的力矩Mi(o)的大小可是千差万别的。
画了一张图,觉得对理解这一点可能会有所帮助。特在此奉献给大家。
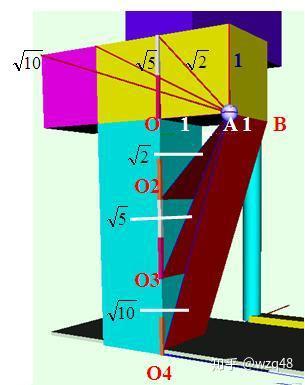
图中间立轴是z轴OO2O3O4,圆球A代表质点,OA为质点相对z轴上o点的位置矢量ri, AB是质点所受的外力Fi。为简化计算,假设它们的值均为1。 Mzi= Mi(o)= riFiSinα=1,Mi(o)的大小等于ri和Fi所成平行四边形的面积(Mi(o)= |riFiSinα|,(α是由ri转至Fi的夹角),Mi(o)方向可用右手螺旋法由ri、Fi的方向来确定。
从图中很容易看出,四个红色平面面积以及四根红色线段长度都对应着四个Mi(o)的大小,相差很大,但由于力矩方向不同,它们在 z 轴上的投影均为1。动量与角动量的投影关系与此类似。
一孔之见,仅供参考。

就是天平的力 力臂的乘积啊。
只是到力学这里写成叉乘的形式啦。

你把一本书放在桌子上,正常放吧,文具盒也行,一根手指去往前推。
手放在边长的中点,和手放在书的角的位置,你会发现,后者会发生转动。书虽然会往前,同时会扭动。因为力没有指向重心。
(这个可以通过重心是怎么得来的,推导,具体,我记得重心,就是把刚体分成很多块,每个块有质量,还有矢量,力也是矢量,运动离不开质量。所以重心的出现肯定和力之间有关系,好久没学物理了,想深入推导的自己搞下)
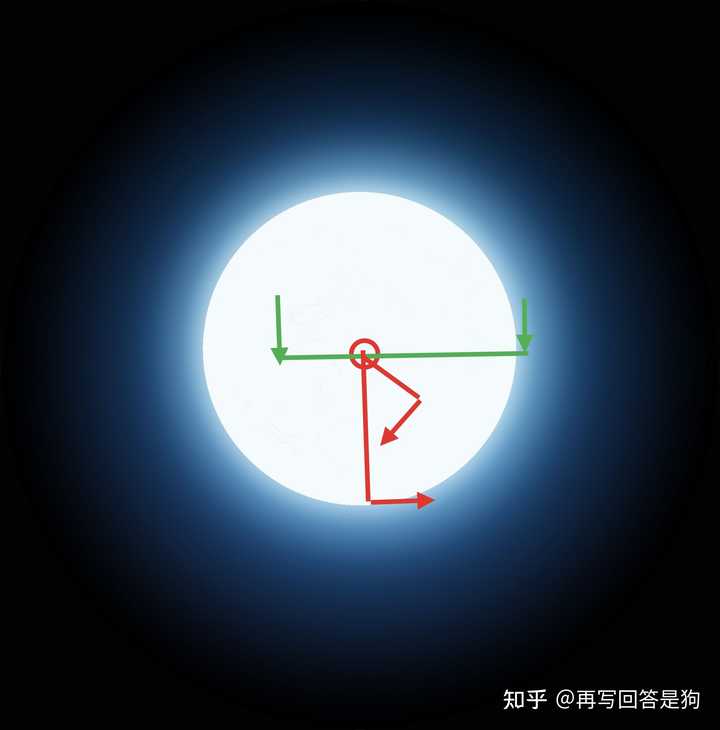
有转盘吗?


假设上图红圈是轴心。那么红色的力,转盘不会转动,蓝色的力,会转动我们让转盘转都是往左右拨而不是正前方推。
绿色的力,他在蓝色方向的分力,会转动,在红色方向不会转动,所以会出现F*sin(看具体给的角,有时候会是cos,主要表示的是蓝色方向会转动分力)
好了,搞清楚发生转动的力,再来看为什么会乘一个半径。这个时候,我们要用到一个常见的模型。跷跷板或者杠杆

首先看绿色的模型,我们知道,跷跷板(杠杆一个道理),要想平衡,不是两边力相等就ok了,而是f*r相等,而这里的f恰好就是让杠杆发生转动的力(当然现实中一旦跷跷板不水平,重力和力臂不垂直,就需要用和力臂垂直的分力了,这也是天平倾斜后会静止的原因自己分析)
好了,说清楚力矩了,两个相反的力矩(产生转动方向相反,一般用顺逆时针,取一个作为正方向),如果发现力矩相等,会不转动。(两个相反的力大小相等会平衡)
同样的两个力矩,他们的合力矩,(就是正负想加出现的结果)如果为正,就正方向转动,如果为负,于正方向相反的方向转动。
对比,两个相反的力→←,合力为正,正方向直线运动
这就是转动时用力矩而不是力。再来看其他问题。这个就简单了。
转动有几个量,线速度v,转动主要单位是角速度,角速度w(凑合下)v=ft/m(就是加速度乘时间)
v=w*r那么w=v/r=ft/(mr)=Mt/(mrr)好像翻车了哈哈。角速度的公式有没有等于力矩除以半径平方然后再乘其他参数的?

先了解一下刚体的加速旋转,是因为力矩的作用吧。


而这一事实实际上是由角动量守恒导致的,角动量守恒反映了空间的各向同性。